Jakie pozycje równoważne generuje element symetrii zaznaczony na poniższym rysunku?
Symbol elementu symetrii
A. Olczak
5 komentarzy do “36. Element symetrii”
Na początek wyjaśnijmy oznaczenia. Wskazany symbol oznacza oś trójkrotną śrubową (31) przebiegającą równolegle do jednej z głównych, przestrzennych, przekątnych komórki elementarnej ( sześcianu). Kropka na osi symbolu podaje miejsce przecięcia przez oś płaszczyzny z = 0. Układ współrzędnych jest taki, że początek układu współrzędnych jest w lewym górnym rogu, oś 0X biegnie w dół a oś 0Y w prawo. Wiadomo więc, że oś przecina dolną ścianę komórki elementarnej w punkcie (1/6, 1/6, 0).
Tyle na razie, ciąg dalszy nastąpi :-).
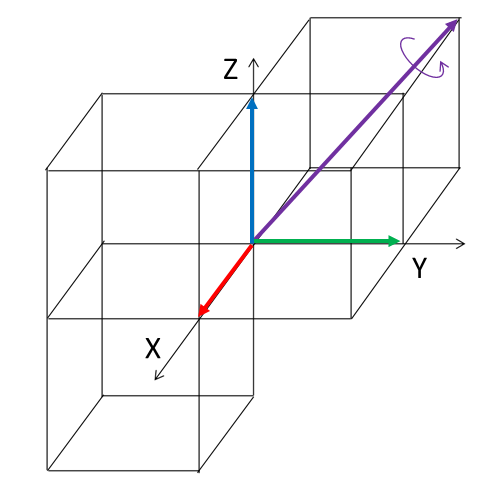
Zgodnie z rysunkiem poniżej widać, że kierunek osi jest zgodny z [-1 1 1] lub równoważnie, w drugą stronę od zera, [1 -1 -1]. Na razie nie martwimy się równoległym przesunięciem osi.
Realizując obrót wokół fioletowego wektora w kierunku przeciwnym do wskazówek zegara, stwierdzamy następujące przechodzenie wektorów bazowych a -> -c, b -> -a, c -> b. Odpowiada to operacji symetrii postaci:
| 0 -1 0 d|
| 0 0 1 e|
|-1 0 0 f|
| 0 0 0 1|,
gdzie na razie translacje d, e i f są nieznane. Po zrobieniu 3 potęgi tej operacji otrzymamy wektor translacji sieciowej odpowiadający przesunięciu po pełnym obrocie (czyli wektor zgodny z kierunkiem osi i siecią: (-1 1 1)).
Mamy więc d = 0 oraz e+f = 1. Załóżmy e=f=1/2.
Otrzymaliśmy operację dającą pozycje równoważne (-y, z + 1/2, -x+ 1/2).
Jest to więc poszukiwana odpowiedź.
Można sprawdzić, że taka operacja występuje w tablicach IUCr :-).
Pozostaje pytanie przez jakie punkty przechodzi taka oś 31.
Aby to rozwiązać należy uzyskać równanie czystej rotacji. Ponieważ następny punkt węzłowy po obrocie o 360 stopni ma współrzędne (-1 1 1), [lub (1 -1 -1)] dodamy (*) 1/3 tego wektora do równania zasadniczego. (*) – błąd, patrz uwaga w ostatnim komentarzu.
Otrzymujemy
x = -y -1/3; y = z + 1/2+1/3; z = -x + 1/2 +1/3. Czyli
x = -y -1/3; y = z + 5/6; z = -x + 5/6.
Podstawiając z = 0, otrzymamy współrzędne x = y = 5/6. W tym miejscu jest jednak symbol osi 32.
Biorąc drugi wektor (1 -1 -1) otrzymamy
x = -y +1/3; y = z + 1/2-1/3; z = -x + 1/2 -1/3.
Teraz biorąc z = 0 otrzymamy x = y = 1/6 w zgodzie z rysunkiem.
Mam nadzieję, że nie pomyliłem się w rachunkach albo popełniłem błąd ciekawy dydaktycznie.
Proponuję nieco inną drogę rozwiązania tego zadania.
Po pierwsze, musimy wybrać właściwy zwrot osi spośród dwu kierunków: [-1 1 1] albo [1 -1 -1].
Każda oś przechodząca przez środek układu współrzędnych przechodzi przez dwa związane środkiem symetrii (w początku układu) oktanty. Jeżeli obliczymy ich “objętość” jako iloczyn współrzędnych definiujących krawędzie danego oktantu, to otrzymamy dla jednego z nich wartość dodatnią, a dla drugiego ujemną. Umówmy się, że dla określenia zwrotu osi wybieramy oktant z dodatnią “objętością”. W naszym przypadku mamy (-1)x1x1=-1 lub 1x(-1)x(-1)=1, a więc wybieramy drugą możliwość, czyli wektor [1-1-1].
Dodatni kierunek obrotu definiujemy jako przeciwny do ruchu wskazówek zegara, kiedy patrzymy wzdłuż osi obrotu przeciwnie do jej zwrotu (rys. 1).
Rozwiązanie naszego zadania będzie przebiegało w trzech etapach.
1. Wyznaczenie macierzy obrotu o 120 stopni względem osi o kierunku [1-1-1] przechodzącej przez początek układu i pozycji równoważnej z tego wynikającej.
Spójrzmy na rysunek 2. Macierz obrotu konstruujemy sprawdzając jak przekształcają się przy tym obrocie wektory bazowe a, b, c i wynik zapisujemy w kolumnach. Widzimy, że a -> -b, -b -> -c, -c -> a. Mnożąc przez (-1) dwie ostatnie relacje otrzymujemy: a -> -b, b -> c, c -> -a. Macierz obrotu o 120 stopni (nazwijmy ją R) przyjmuje więc postać:
0 0 -1
-1 0 0
0 1 0
a pozycja równoważna jej odpowiadająca jest następująca: (-z, -x, y).
2. Wyznaczenie pozycji równoważnej dla osi obrotu przesuniętej o wektor p.
Aby wyznaczyć pozycję równoważną wynikającą z obrotu o pewien kąt względem osi nieprzechodzącej przez początek układu współrzędnych i oddalonej od początku układu o wektor p, skorzystamy z reguły którą przyjmiemy bez (dość łatwego) dowodu. Reguła ta mówi, że jeżeli oś obrotu jest oddalona od początku układu o wektor p, to do pozycji równoważnej dla osi przechodzącej przez początek układu należy dodać następującą translację: -Rp+p. Nasza oś przechodzi przez punkt o współrzędnych (1/6, 1/6, 0) który jest końcem wektora p, a początek tego wektora jest w początku układu współrzędnych (0, 0, 0). A zatem współrzędne wektora p to [1/6, 1/6, 0]. Po wykonaniu odpowiednich operacji arytmetycznych otrzymamy ostatecznie postać wektora –Rp+p: [1/6, 1/3, -1/6]. A zatem nasza pozycja równoważna przyjmie postać:
(-z+1/6, -x+1/3, y-1/6).
3. Dodanie translacji śrubowej.
Ponieważ mamy do czynienia z osią śrubową 31, to należy do pozycji równoważnej dodać jeszcze translację z tego wynikającą. Translacja o 1/3 przekątnej wzdłuż wektora [1-1-1] przyjmie postać [1/3, -1/3, -1/3]. Dodając ją do poprzednio otrzymanej pozycji równoważnej otrzymamy:
(-z+1/2, -x, y-1/2).
A zatem, oś ta generuje następujące pozycje równoważne (rys. 3 i 4):
1) (x, y, z),
2) (-z+1/2, -x, y-1/2),
3) (-y+1, z-1/2, -x-1/2).
Właściwie wszystko jasne i można postawić kropkę. Ja jednak postanowiłem pokazać zainteresowanym czytelnikom jak maksymalnie uprościć pracę mentalną nad uzyskaniem rozwiązania i pokazać jak szybko, wygodnie i elegancko (i bez założeń branych z powietrza jak w moim pierwszym rozwiązaniu) można dojść do końcowego wyniku w dwóch etapach.
Naszym podstawowym narzędziem będą macierze Seitza wymiaru 4×4 (rozszerzone).
Zakładam, że postać operacji symetrii w odniesieniu do osi wyznaczymy w pierwszym etapie tak, jak poprzednio w pierwszej odpowiedzi, czyli zakładamy rotację w postaci (-y, z, -x).
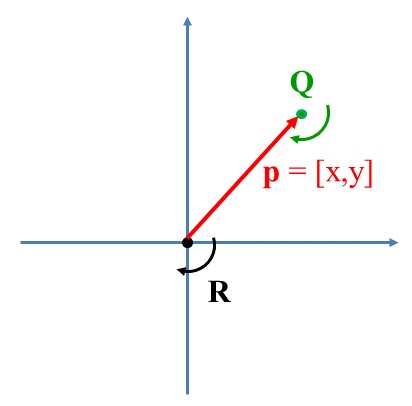
Operację symetrii Q, generowaną przez przesuniętą oś będziemy rozważać jako złożenie przesunięcia współrzędnych o wektor –p, aby oś obrotu umieścić w punkcie zerowym, obrót wokół tej osi i ponowne przesunięcie współrzędnych o wektor p. Dla dwóch wymiarów obrazuje to rysunek 1.
Skoro operację Q możemy traktować jako złożenie translacji, obrotu i ponownej translacji, to jej macierz możemy otrzymać przez pomnożenie odpowiednich macierzy. Q = Tp R T-p.
Dla uproszczenia macierze rozszerzone możemy zapisać w postaci blokowej jak w poniższym przykładzie.
co właściwie mieliśmy już podane, z pominięciem dowodu, w poprzednim wpisie. Widzimy jasno, że część translacyjna w przesuniętej operacji symetrii wynosi p -Rp. Co więcej, analogiczne złożenie operacji możemy wykonać od razu na macierzy dowolnego obrotu śrubowego (np. z naszą translacją t = -1/3 1/3 1/3). Można to łatwo uzasadnić stosując poprzedni algorytm:
przekształcamy jak poprzednio: Q = Tp R T-p, otrzymując od razu macierz Q
| 0 -1 0 0|
| 0 0 1 1/2|
|-1 0 0 1/2|
| 0 0 0 1|
Pozycja równoważna do (xyz) będzie więc wyglądać następująco (-y, z + 1/2, -x + 1/2) (nr 10 w tablicach).
Kolejna pozycja równoważna (-z -1/2, -x +1, y +1/2) i w końcu (x-1, y+1, z+1) w zgodzie z wektorem sieciowym.
Do obliczeń w celu wyeliminowania przypadkowych błędów można zaprząc program Excel.
Oczywiście jeżeli podstawimy wartości z drugiego rozwiązania to wynik jest zgodny z przedstawionym poprzednio (i z obecnym po przestawieniu kolejności pozycji równoważnych i uwzględnieniu równoważności translacyjnej punktów).
Mam nadzieję, że teraz sytuacja jest całkiem klarowna.
Errata
P.S.1. W pierwszym rozwiązaniu aby otrzymać równanie dla osi zwykłej należało ODJĄĆ wektor ślizgu, a więc rozwiązanie przecinające płaszczyznę z = 0 dla współrzędnych 1/6 1/6 pojawić się powinno dla wektora translacji sieciowej -1 1 1.
P.S.2. W roztargnieniu opuściłem jeden znak minus (przy a w drugim wierszu) i właściwie warunek dla translacji powinien być tylko jeden: 1+a = b+c. Dla a = 0 nie miało to znaczenia. Zgadywanie nie jest najlepszym rozwiązaniem.
Przyjrzyjmy się obu rozwiązaniom w postaci zespołów pozycji równoważnych:
JCH
1. (-y, z+1/2, -x+1/2)
2. (-z-1/2, -x-1, y +1/2)
3. (x-1, y+1, z+1)
AO
1. (-z+1/2, -x, y-1/2)
2. (-y+1, z-1/2, -x-1/2)
3. (x+1, y-1, z-1)
Zauważmy, że AO pozycja 1. jest tożsama z JCH 2. + translacja [1 -1 -1].
Podobnie, AO pozycja 2. jest tożsama z JCH 1. po dodaniu translacji [1 -1 -1].
Oczywiście również pozycje 3 są równoważne po dodaniu 2 wektorów [1 -1 -1].
Są to więc punkty leżące na tej samej prawoskrętnej helisie, tylko przy rozpatrywaniu innego kierunku osi. Jako pierwsze pozycje równoważne do (xyz) pojawiają się inne punkty z tej samej helisy (powyżej i poniżej).
Można punkty helisy też przenumerować inaczej, nadając pozycjom JCH indeksy ujemne.
(3) (x+1, y-1, z-1)
(2) (-y+1, z-1/2, -x-1/2)
(1) (-z+1/2, -x, y-1/2)
(0) (x, y, z)
(-1) (-y, z+1/2, -x+1/2)
(-2) (-z-1/2, -x-1, y +1/2)
(-3) (x-1, y+1, z+1)
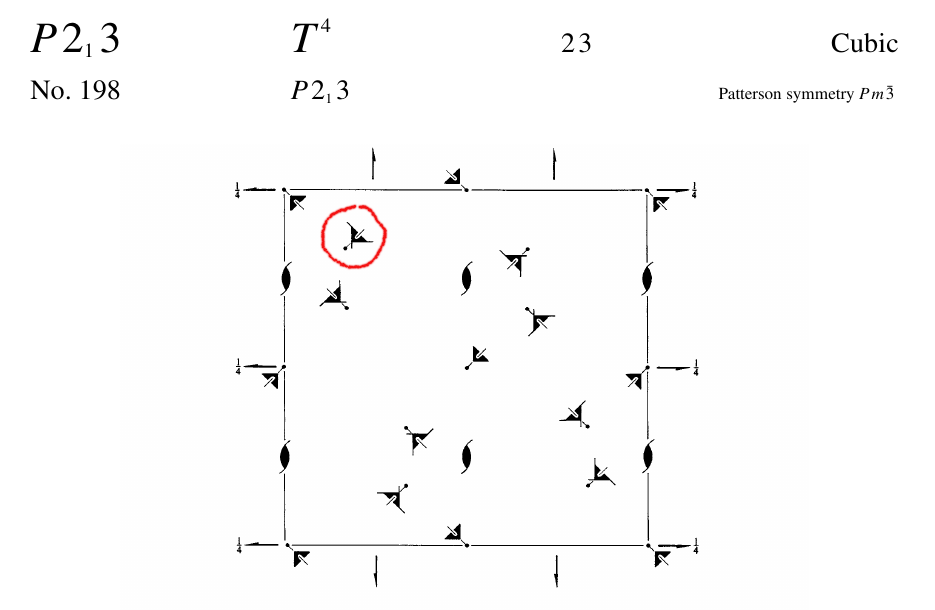
Na początek wyjaśnijmy oznaczenia. Wskazany symbol oznacza oś trójkrotną śrubową (31) przebiegającą równolegle do jednej z głównych, przestrzennych, przekątnych komórki elementarnej ( sześcianu). Kropka na osi symbolu podaje miejsce przecięcia przez oś płaszczyzny z = 0. Układ współrzędnych jest taki, że początek układu współrzędnych jest w lewym górnym rogu, oś 0X biegnie w dół a oś 0Y w prawo. Wiadomo więc, że oś przecina dolną ścianę komórki elementarnej w punkcie (1/6, 1/6, 0).
Tyle na razie, ciąg dalszy nastąpi :-).
Zgodnie z rysunkiem poniżej widać, że kierunek osi jest zgodny z [-1 1 1] lub równoważnie, w drugą stronę od zera, [1 -1 -1]. Na razie nie martwimy się równoległym przesunięciem osi.
Realizując obrót wokół fioletowego wektora w kierunku przeciwnym do wskazówek zegara, stwierdzamy następujące przechodzenie wektorów bazowych a -> -c, b -> -a, c -> b. Odpowiada to operacji symetrii postaci:
gdzie na razie translacje d, e i f są nieznane. Po zrobieniu 3 potęgi tej operacji otrzymamy wektor translacji sieciowej odpowiadający przesunięciu po pełnym obrocie (czyli wektor zgodny z kierunkiem osi i siecią: (-1 1 1)).
Mamy więc d = 0 oraz e+f = 1. Załóżmy e=f=1/2.
Otrzymaliśmy operację dającą pozycje równoważne (-y, z + 1/2, -x+ 1/2).
Jest to więc poszukiwana odpowiedź.
Można sprawdzić, że taka operacja występuje w tablicach IUCr :-).
Pozostaje pytanie przez jakie punkty przechodzi taka oś 31.
Aby to rozwiązać należy uzyskać równanie czystej rotacji. Ponieważ następny punkt węzłowy po obrocie o 360 stopni ma współrzędne (-1 1 1), [lub (1 -1 -1)] dodamy (*) 1/3 tego wektora do równania zasadniczego. (*) – błąd, patrz uwaga w ostatnim komentarzu.
Otrzymujemy
x = -y -1/3; y = z + 1/2+1/3; z = -x + 1/2 +1/3. Czyli
x = -y -1/3; y = z + 5/6; z = -x + 5/6.
Podstawiając z = 0, otrzymamy współrzędne x = y = 5/6. W tym miejscu jest jednak symbol osi 32.
Biorąc drugi wektor (1 -1 -1) otrzymamy
x = -y +1/3; y = z + 1/2-1/3; z = -x + 1/2 -1/3.
Teraz biorąc z = 0 otrzymamy x = y = 1/6 w zgodzie z rysunkiem.
Mam nadzieję, że nie pomyliłem się w rachunkach albo popełniłem błąd ciekawy dydaktycznie.
Proponuję nieco inną drogę rozwiązania tego zadania.
Po pierwsze, musimy wybrać właściwy zwrot osi spośród dwu kierunków: [-1 1 1] albo [1 -1 -1].

Każda oś przechodząca przez środek układu współrzędnych przechodzi przez dwa związane środkiem symetrii (w początku układu) oktanty. Jeżeli obliczymy ich “objętość” jako iloczyn współrzędnych definiujących krawędzie danego oktantu, to otrzymamy dla jednego z nich wartość dodatnią, a dla drugiego ujemną. Umówmy się, że dla określenia zwrotu osi wybieramy oktant z dodatnią “objętością”. W naszym przypadku mamy (-1)x1x1=-1 lub 1x(-1)x(-1)=1, a więc wybieramy drugą możliwość, czyli wektor [1-1-1].
Dodatni kierunek obrotu definiujemy jako przeciwny do ruchu wskazówek zegara, kiedy patrzymy wzdłuż osi obrotu przeciwnie do jej zwrotu (rys. 1).
Rozwiązanie naszego zadania będzie przebiegało w trzech etapach.
1. Wyznaczenie macierzy obrotu o 120 stopni względem osi o kierunku [1-1-1] przechodzącej przez początek układu i pozycji równoważnej z tego wynikającej.
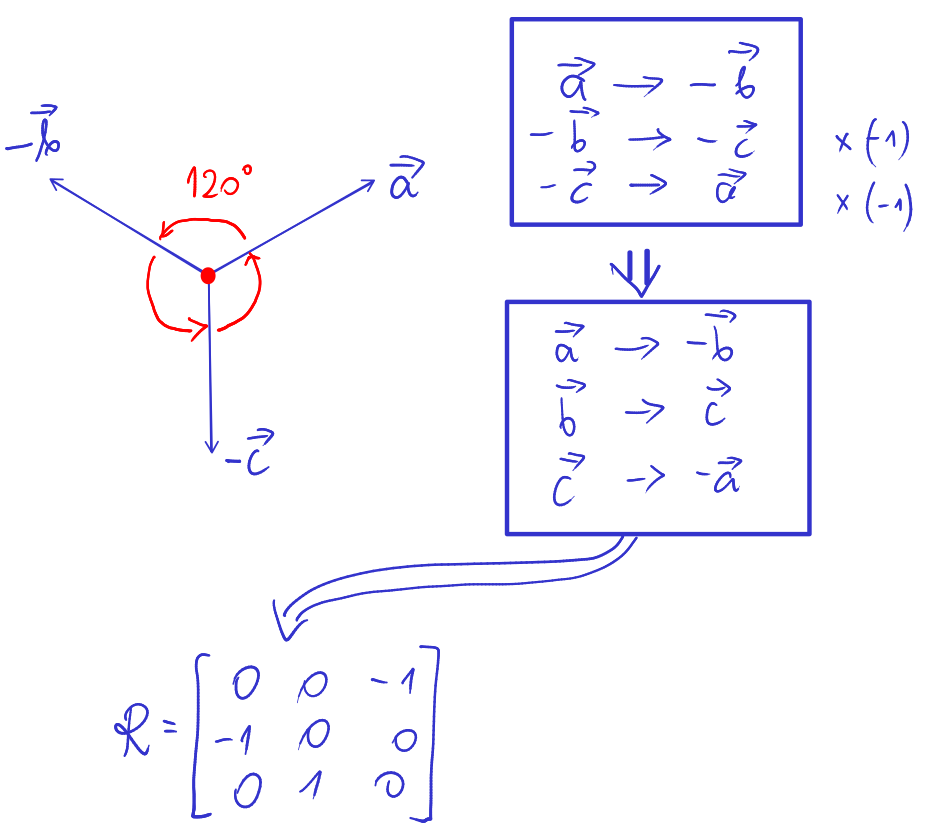
Spójrzmy na rysunek 2. Macierz obrotu konstruujemy sprawdzając jak przekształcają się przy tym obrocie wektory bazowe a, b, c i wynik zapisujemy w kolumnach. Widzimy, że a -> -b, -b -> -c, -c -> a. Mnożąc przez (-1) dwie ostatnie relacje otrzymujemy: a -> -b, b -> c, c -> -a. Macierz obrotu o 120 stopni (nazwijmy ją R) przyjmuje więc postać:
a pozycja równoważna jej odpowiadająca jest następująca: (-z, -x, y).
2. Wyznaczenie pozycji równoważnej dla osi obrotu przesuniętej o wektor p.
Aby wyznaczyć pozycję równoważną wynikającą z obrotu o pewien kąt względem osi nieprzechodzącej przez początek układu współrzędnych i oddalonej od początku układu o wektor p, skorzystamy z reguły którą przyjmiemy bez (dość łatwego) dowodu. Reguła ta mówi, że jeżeli oś obrotu jest oddalona od początku układu o wektor p, to do pozycji równoważnej dla osi przechodzącej przez początek układu należy dodać następującą translację: -Rp+p. Nasza oś przechodzi przez punkt o współrzędnych (1/6, 1/6, 0) który jest końcem wektora p, a początek tego wektora jest w początku układu współrzędnych (0, 0, 0). A zatem współrzędne wektora p to [1/6, 1/6, 0]. Po wykonaniu odpowiednich operacji arytmetycznych otrzymamy ostatecznie postać wektora –Rp+p: [1/6, 1/3, -1/6]. A zatem nasza pozycja równoważna przyjmie postać:
(-z+1/6, -x+1/3, y-1/6).
3. Dodanie translacji śrubowej.
Ponieważ mamy do czynienia z osią śrubową 31, to należy do pozycji równoważnej dodać jeszcze translację z tego wynikającą. Translacja o 1/3 przekątnej wzdłuż wektora [1-1-1] przyjmie postać [1/3, -1/3, -1/3]. Dodając ją do poprzednio otrzymanej pozycji równoważnej otrzymamy:
(-z+1/2, -x, y-1/2).
A zatem, oś ta generuje następujące pozycje równoważne (rys. 3 i 4):
1) (x, y, z),
2) (-z+1/2, -x, y-1/2),
3) (-y+1, z-1/2, -x-1/2).
Właściwie wszystko jasne i można postawić kropkę. Ja jednak postanowiłem pokazać zainteresowanym czytelnikom jak maksymalnie uprościć pracę mentalną nad uzyskaniem rozwiązania i pokazać jak szybko, wygodnie i elegancko (i bez założeń branych z powietrza jak w moim pierwszym rozwiązaniu) można dojść do końcowego wyniku w dwóch etapach.
Naszym podstawowym narzędziem będą macierze Seitza wymiaru 4×4 (rozszerzone).
Zakładam, że postać operacji symetrii w odniesieniu do osi wyznaczymy w pierwszym etapie tak, jak poprzednio w pierwszej odpowiedzi, czyli zakładamy rotację w postaci (-y, z, -x).
Operację symetrii Q, generowaną przez przesuniętą oś będziemy rozważać jako złożenie przesunięcia współrzędnych o wektor –p, aby oś obrotu umieścić w punkcie zerowym, obrót wokół tej osi i ponowne przesunięcie współrzędnych o wektor p. Dla dwóch wymiarów obrazuje to rysunek 1.
Skoro operację Q możemy traktować jako złożenie translacji, obrotu i ponownej translacji, to jej macierz możemy otrzymać przez pomnożenie odpowiednich macierzy. Q = Tp R T-p.
Dla uproszczenia macierze rozszerzone możemy zapisać w postaci blokowej jak w poniższym przykładzie.
obrót | 0 -1 0 0| |R 0| | 0 0 1 0| = |0 1| |-1 0 0 0| | 0 0 0 1| translacja | 1 0 0 x| |I p| | 0 1 0 y| = |0 1| | 0 0 1 z| | 0 0 0 1|Mamy więc:
co właściwie mieliśmy już podane, z pominięciem dowodu, w poprzednim wpisie. Widzimy jasno, że część translacyjna w przesuniętej operacji symetrii wynosi p -Rp. Co więcej, analogiczne złożenie operacji możemy wykonać od razu na macierzy dowolnego obrotu śrubowego (np. z naszą translacją t = -1/3 1/3 1/3). Można to łatwo uzasadnić stosując poprzedni algorytm:
Macierz obrotu śrubowego R mieliśmy już zdefiniowaną dla środka układu współrzędnych
| 0 -1 0 -1/3| |R t| | 0 0 1 1/3| = |0 1| |-1 0 0 1/3| | 0 0 0 1 |przekształcamy jak poprzednio: Q = Tp R T-p, otrzymując od razu macierz Q
| 0 -1 0 0| | 0 0 1 1/2| |-1 0 0 1/2| | 0 0 0 1|Pozycja równoważna do (xyz) będzie więc wyglądać następująco (-y, z + 1/2, -x + 1/2) (nr 10 w tablicach).
Kolejna pozycja równoważna (-z -1/2, -x +1, y +1/2) i w końcu (x-1, y+1, z+1) w zgodzie z wektorem sieciowym.
Do obliczeń w celu wyeliminowania przypadkowych błędów można zaprząc program Excel.
Oczywiście jeżeli podstawimy wartości z drugiego rozwiązania to wynik jest zgodny z przedstawionym poprzednio (i z obecnym po przestawieniu kolejności pozycji równoważnych i uwzględnieniu równoważności translacyjnej punktów).
Mam nadzieję, że teraz sytuacja jest całkiem klarowna.
Errata
P.S.1. W pierwszym rozwiązaniu aby otrzymać równanie dla osi zwykłej należało ODJĄĆ wektor ślizgu, a więc rozwiązanie przecinające płaszczyznę z = 0 dla współrzędnych 1/6 1/6 pojawić się powinno dla wektora translacji sieciowej -1 1 1.
P.S.2. W roztargnieniu opuściłem jeden znak minus (przy a w drugim wierszu) i właściwie warunek dla translacji powinien być tylko jeden: 1+a = b+c. Dla a = 0 nie miało to znaczenia. Zgadywanie nie jest najlepszym rozwiązaniem.
Podsumowanie końcowe
Przyjrzyjmy się obu rozwiązaniom w postaci zespołów pozycji równoważnych:
JCH
1. (-y, z+1/2, -x+1/2)
2. (-z-1/2, -x-1, y +1/2)
3. (x-1, y+1, z+1)
AO
1. (-z+1/2, -x, y-1/2)
2. (-y+1, z-1/2, -x-1/2)
3. (x+1, y-1, z-1)
Zauważmy, że AO pozycja 1. jest tożsama z JCH 2. + translacja [1 -1 -1].
Podobnie, AO pozycja 2. jest tożsama z JCH 1. po dodaniu translacji [1 -1 -1].
Oczywiście również pozycje 3 są równoważne po dodaniu 2 wektorów [1 -1 -1].
Są to więc punkty leżące na tej samej prawoskrętnej helisie, tylko przy rozpatrywaniu innego kierunku osi. Jako pierwsze pozycje równoważne do (xyz) pojawiają się inne punkty z tej samej helisy (powyżej i poniżej).
Można punkty helisy też przenumerować inaczej, nadając pozycjom JCH indeksy ujemne.
(3) (x+1, y-1, z-1)
(2) (-y+1, z-1/2, -x-1/2)
(1) (-z+1/2, -x, y-1/2)
(0) (x, y, z)
(-1) (-y, z+1/2, -x+1/2)
(-2) (-z-1/2, -x-1, y +1/2)
(-3) (x-1, y+1, z+1)