Współrzędne Webera w układzie heksagonalnym (w dwu wymiarach).
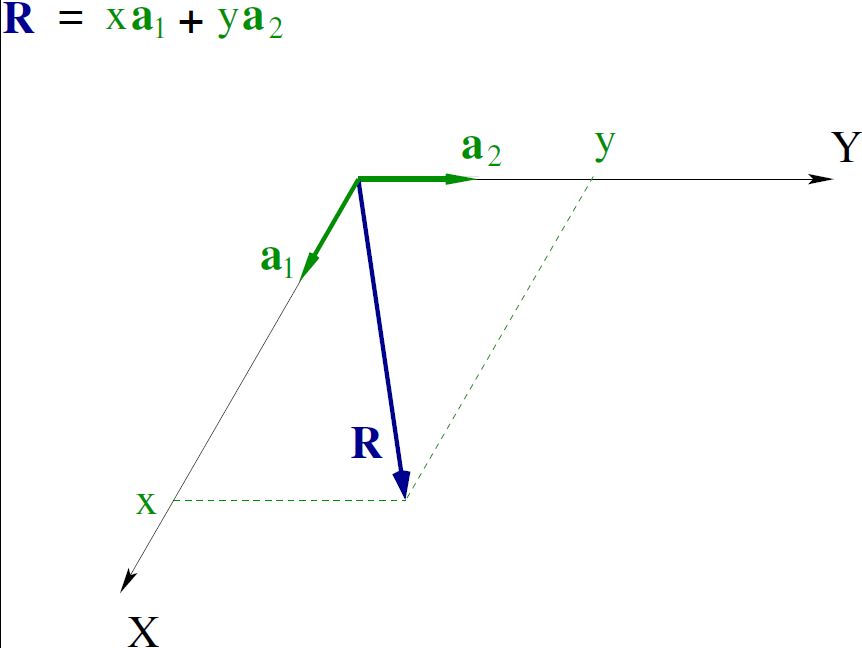
Współrzędne wektora – nazwijmy go R – można przedstawić (tak jak w każdym innym układzie) jako odpowiednie rzuty równoległe wektora R = x*a1 + y*a2 na osie współrzędnych (rys. 1).
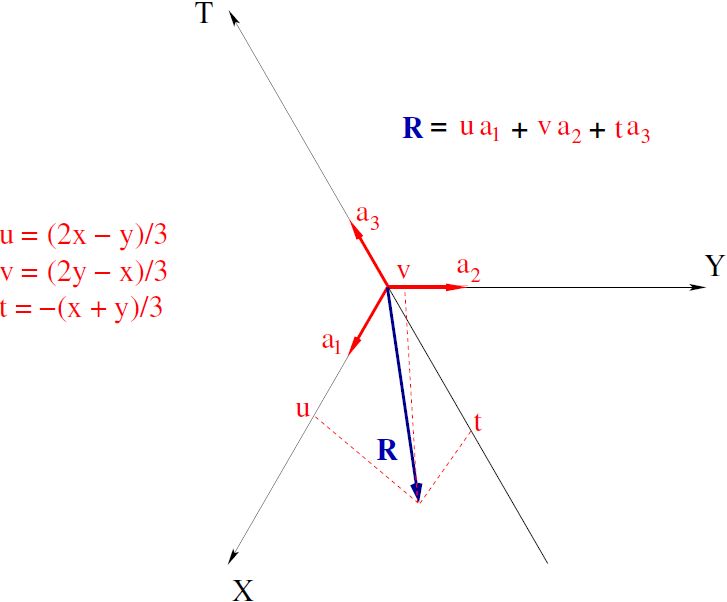
Czasami, ze względu na trójkrotną symetrię występującą w tym układzie, zamiast dwu osi współrzędnych X i Y używa się trzech osi: X, Y, T (rys.2). Są to tzw. współrzędne Webera. W tych współrzędnych wektor R można zapisać jako R = u*a1 + v*a2 + t*a3, a odpowiednie relacje między starymi a nowymi współrzędnymi są następujące: u = (2x – y)/3, v = (2y – x)/3, t = -(x +y). Z powyższych relacji wynika, że u + v + t = 0.
Jaka jest geometryczna interpretacja współrzędnych u, v, t? Nie może być to oczywiście rzutowanie równoległe (do odpowiednich osi współrzędnych) – jak to ma miejsce w przypadku współrzędnych x, y – bo istnieją dwie równoważne osie, wzdłuż których należałoby rzutować, co czyniłoby tę procedurę niejednoznaczną. Może należy wykonać rzutowanie równoległe wzdłuż jakichś innych linii, a może należy rzutować prostopadle do osi współrzędnych?
Andrzej Olczak
Początkowo chciałem dać bezpośrednią odpowiedź, ale najpierw powstaje zasadnicze pytanie – dlaczego obrano taki dziwaczny sposób oznaczenia kierunków. W tablicach miedzynarodowych nie znalazłem hasła “weber indices” or “weber indexes”, więc chyba te czterowskaźnikowe oznaczenia kierunków nie są obecnie preferowane czy powszechnie używane. Moją uwagę zwróciło to, że te czterowskażnikowe oznaczenia kierunków są takie same jak oznaczenia prostopadłych do nich płaszczyzn w układzie heksagonalnym i może to była przyczyna takiego sposobu wyznaczania indeksów. Mając trzy osie na płaszczyźnie mamy pewną swobodę i tu wykorzystano ją dla spójności opisu płaszczyzn i kierunków. Tym niemniej w układach jednoskośnym, czy tym bardziej trójskośnym wektor [001] nie jest już na ogół prostopadły do płaszczyzny (001) i nie jest to problem. Wektor normalny i wektor leżący na płaszczyźnie są za to ortogonalne, jeżeli zastosować uogólniony iloczyn skalarny (x*y = xTMy, gdzie M – macierz metryczna).
Na stronach iucr.org są podane definicje tych współrzędnych:
http://reference.iucr.org/dictionary/Weber_indices
A swoją drogą ciekawe spostrzeżenie dotyczące identyczności indeksów ścian i odpowiednich wektorów (we współrzędnych Webera) do nich prostopadłych.
Teraz już pełniejsza odpowiedź, po przemyśleniach. Wektor kierunku w krystalografii (i ogólnie w geometrii) określa się poprzez podanie punktu początkowego i końcowego. Punktem początkowym jest zwykle początek układu współrzędnych, wiec pozostaje określić położenie punktu końcowego. Można go określić podając współrzędne oparte o dwa wektory bazowe (a1 i a2) i zastosować regułę równoległoboku, czyli rzutowanie równoległe. Nic nie stoi na przeszkodzie, aby punkt wskazać jako sumę trzech wektorów. Jak napisano powyżej R = u*a1 + v*a2 + t*a3. Takie wskazanie JEST jednoznaczne. To tak jak sumowanie kilku sił w fizyce. Problem polega jedynie na tym, że mając punkt R nie wiadomo (nie jest oczywiste), jak przejść na wskaźniki u,v,t bo teraz istnieje wiele możliwości wybrania ścieżki sumowania i w tę stronę nie ma jednoznaczności. Przejście to staje się jednoznaczne dopiero przy zdefiniowaniu dodatkowego warunku np. u + v + t = 0, z czego wynikają wzory na wyliczanie współrzędnych dla danego punktu określonego przez współrzędne x,y. Zamiast rzutowania pozostają rachunki.
Jeśli jednak ktoś chciałby użyć rzutowania równoległego, to musi punkt R zrzutować równolegle na nowe, inaczej określone osie: U = 2a1 + a2 i V = a1 + 2a2, a trzecią współrzędną obliczyć z warunku u + v + t = 0. Dodam, że oś U jest prostopadła do a2 i V prostopadła do a1. Procedura ta wynika z transformacji współrzędnych. Mogę podać szczegóły w kolejnym komentarzu, jeśli ktoś chciałby prześledzić wyprowadzenie.
Przydałby się rysunek wyjaśniający jak wygląda rzutowanie na te nowe osie i jakie są wektory bazowe na tych osiach.
Oto i rysunki. Jako przykładowy wektor do indeksowania uzyłem ten sam [1 0], który był analizowany.
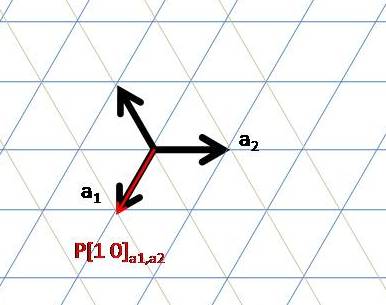
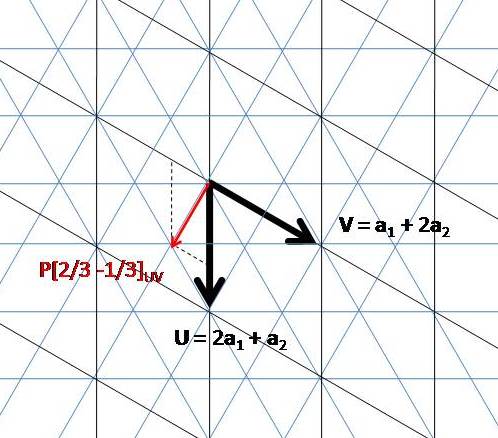
Ponownie (jak w komentarzu A. Olczaka) aby otrzymać całkowite współrzędne należy pomnożyć wynik rzutowania przez trzy. Wynik rzutowania jest identyczny z obliczeniami wg wzorów, chociaż oczywiście trzeba dodać współrzędną T jako dopełnienie do zera. Jak widać i ta procedura (choć skomplikowana) prowadzi do wyniku P[2/3 -1/3 -1/3]UVT czyli kierunek [2 -1 -1].
Właściwie jest to rzutowanie na wektory sieci odwrotnej, więc interpretacja wskaźników jako rzutów prostopadłych do osi a1, a2 i a3 jest równoważna.
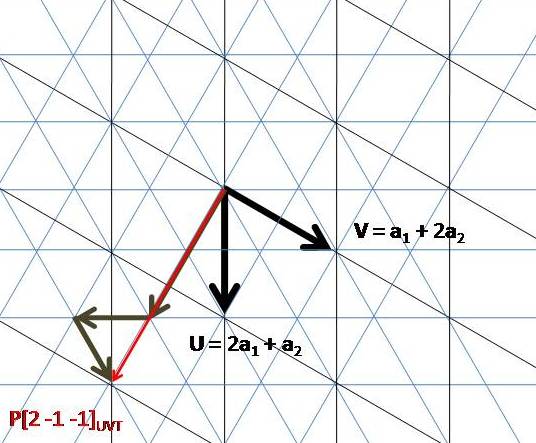
Współrzędne Webera jednocześnie wskazują punkt przez który przechodzi kierunek w postaci P = ua1 + va2 + ta3, co zaznaczono na rysunku szarymi strzałkami.
Jaroslaw Chojnacki
Odpowiadając na początkowe pytanie o geometryczną interpretację współrzędnych Webera należy zwrócić najpierw uwagę na to, że wzory na podstawie których są wyliczane te współrzędne nie są traktowane całkiem ściśle. Jeżeli np. dla wektora [1 0] we współrzędnych heksagonalnych obliczymy u, v, t, to dostaniemy: u = 2/3, v = -1/3, t = -1/3. Nie używamy oczywiście takich ułamkowych współrzędnych tylko mnożymy je przez czynnik 3, aby dostać współrzędne całkowite [2 -1 -1].
Przechodząc do meritum wydaje się, że najprostszym sposobem interpretacji jest rzutowanie prostopadłe na osie X, Y, T. Można łatwo wyliczyć, że odpowiednie rzuty (nazwijmy je U, V, T) będą równe U = x – 1/2y, V = -1/2x + y, T = -1/2x – 1/2y. Powtarzając obliczenie współrzędnych dla wektora [1 0] otrzymamy: U = 1, V = -1/2, T = -1/2. I znów mnożąc tak otrzymane współrzędne przez 2 otrzymamy wektor o nowych współrzędnych [2 -1 -1].
Żeby formalnie współrzędne U, V, T miały te same wartości co współrzędne u, v, t można powiedzieć, że są to rzuty prostopadłe na osie X, Y, T gdy wektory bazowe na tych osiach są wydłużone w stosunku do a1, a2 i a3 o czynnik 3/2.
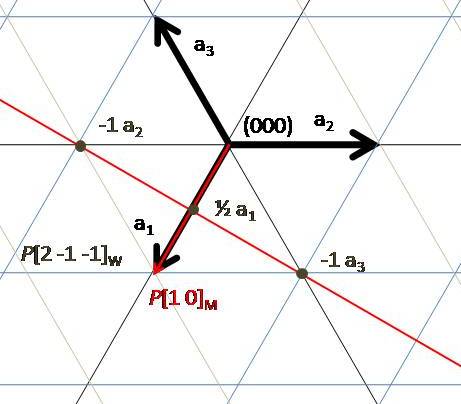
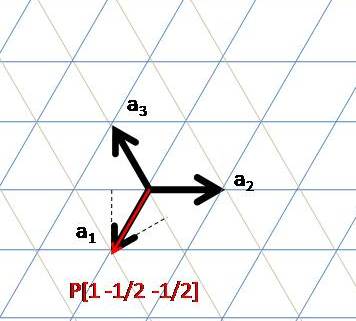
Jeszcze jeden sposób, skuteczny, ale bez ścisłego dowodu (może ktoś potwierdzi albo obali). Wskaźniki Webera można też wyznaczyć geometrycznie (dla 2D), kreśląc linię prostopadła do kierunku OP tak, aby linia przechodziła przez węzły sieci i była jak najbliżej środka układu współrzędnych. Wskaźniki kierunku będą odwrotnościami punktów przecięcia odpowiednich osi. Ilustruje to rysunek.